-
咨询热线:
15062200231 -
电子邮箱:
yin_zhiping@qdsy-sensor.cn
咨询热线:
15062200231电子邮箱:
yin_zhiping@qdsy-sensor.cn
电机操控通常用闭环操控,这就一定要运用传感器,如:霍尔传感器、编码盘等。
可是有的运用场合下,难以装置霍尔传感器、编码盘,或许就算是装置好,也很简略损坏。
霍尔传感器、编码盘都归于方位传感器。那么,无方位传感器,是否也能操控电机?
这样一来,没有了方位传感器,大大简化了设备的装置的办法。可是,会发生别的的一些问题。
MOS管驱动运用L6388ED,其内部逻辑能够有用的防备高边和低边MOS管一起导通。有自举电容让高边MOS导通。
在单片机初始化时,要给L6388ED的自举电容充电一段时间,不然高边MOS管或许不导通,或许不完全导通。
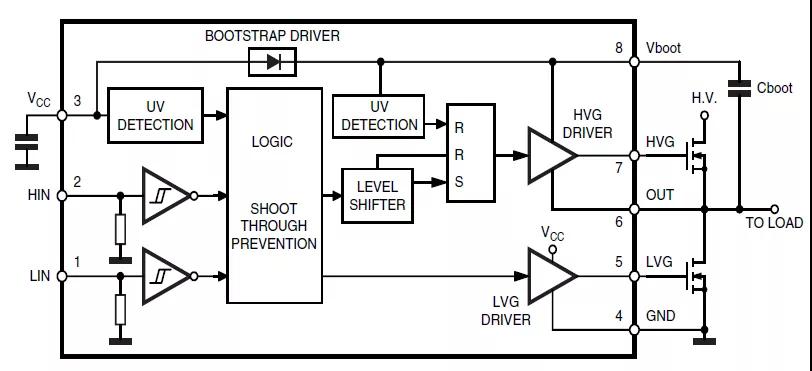
L6388ED自举电容的容值能够由手册上的公式核算得出,我这儿操控低速电机,用的是10uF。
一旦自举电容充完电手,MOS管能够在一段时间内不要充电,一般是电机每次发动时充电。

主张运用15V给L6388ED供电,运用12V的话,或许让MOS不导通或不完全导通,如下图所示。
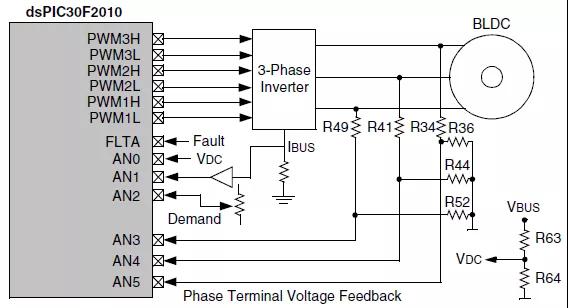
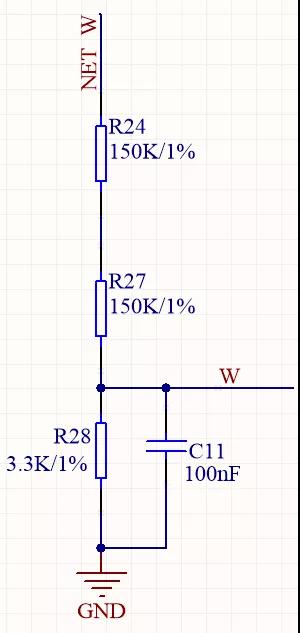
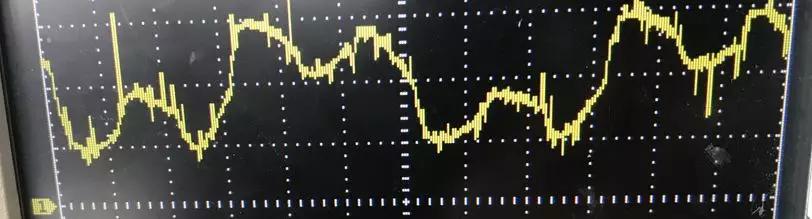
丈量三相电压,如下图所示,NET_W是W相的电压,而W能够直接接单片机的ADC,C11为100nF电容,该电容能够滑润相电压,不能去掉,不然就没办法检测反电动势。U相和V相与此相似,这儿不再赘述。
这种办法在绝大多数的情况下都能对齐,若不能对齐,会发动失利,此刻,从头再发动即可。
这儿的开环是指未检测到反电动势,强制输出PWM,并且在预算好的时间换相,然后让电机转起来。
换相的办法,不同的电机或许不一样(如:极数不同),这儿运用六步换相,如下图所示。

其间,+VBUS表明上桥臂给PWM,-VBUS表明下桥臂给高电平导通,斜线表明上、下桥臂均不导通。
抱负情况下,上、下桥臂均不导通时,在电机某一相电压检测到反电动势过零,可是过零时间和实践要换相的时间,相差30度角。所以,在检测到反电动势过零之后,要延时30度,再换相。
实践情况下,延时的30度还要依据单片机内部的ADC采样,滤波算法进行补偿,这儿的补偿的视点一般是超前的。
因为这儿要运用到的ADC采样率要求不高(20KHz SPS),所以用单片机内部集成的ADC即可。
这儿选用ADC采样的办法。其滤波算法称为择多算法,在另一篇博文再具体介绍。
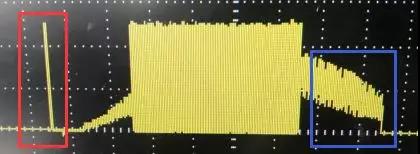
六步换相有问题,或许不呈现红圈中的竖线,也或许不呈现蓝圈中的反电动势。反电动势有问题,电机无法加快。
4.黄色为通过比较器后的波形(非本文运用的办法),蓝色为通过电阻分压和电容滤波后的波形。如下图所示。
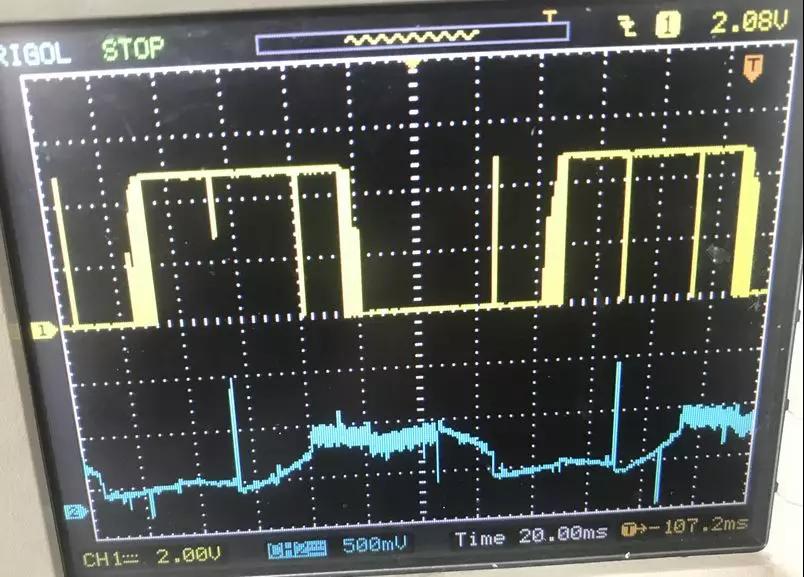
通过比较器后的波形会发生三条竖线,这三条竖线是因为换相引起的,所以在换相时,不判别过零。在不换相时,去抖,判别边缘翻转便是过零点,此办法比ADC滤波要简略一些。